j230697
1、 Produkto pristatymas
Šio išplėtimo lenta gali būti naudojama kaip ratai plėtros valdybos graviravimo staklės, 3D spausdintuvus, kt.Yra keturi kanalai žingsninis variklis ratai modulis lizdus iš viso (atkreipkite dėmesį, kad ši diskusijų lenta nėra įtraukti A4988 žingsninis variklis ratai modulis, kurį galima įsigyti atskirai mūsų parduotuvėje, jei būtina).Jis gali vairuoti, keturių kanalų ne žingsninius variklius ir kiekvieno žingsninis variklis turi tik dvi IO uostų, tai yra šešis IO uostai gali valdyti tris žingsninius variklius gerai, kuris yra labai patogus naudoti, atsisveikinti į nuobodų operacija tradicinių žingsninis variklis.
2、 Įvadas į atitinkamus santykius tarp UNO ir modulis IO port
Pagrindinis kontrolės stepper motorinių reikia, kaiščių.Kiti smeigtukai yra naudojami tik graviravimo mašinos arba 3D spausdintuvai.Mes neaiškinsime juos išsamiai čia.Atitinkamą IO yra parodyta paveikslėlyje aukščiau.
8 ------------------------ LT (žingsninis variklis ratai įjungti terminalą, veiksminga žemas lygis)
7 ---------------------- Z. DIR (krypties valdymo Z-ašis)
6 ------------------------- Y. DIR (Y-ašies kryptimi, kontrolė)
5 ---------------------- X. DIR (X ašies kryptimi kontrolė)
4 --------------------- Z. ŽINGSNIS (žingsnis kontrolės Z-ašis)
3 --------------------- Y. VEIKSMĄ (Y-ašis žengia kontrolė)
2 --------------------- X. ŽINGSNIS (žingsnis kontrolės X ašis)
//Toliau yra paprastas žingsnis variklio valdymo programa,
#Define LT 8//Žingsnis variklis įjungti terminalą, kuris galioja tuo žemas lygis
#define X_ DIR 5//X-ašies žingsninis variklis krypties valdymo
#define Y_ DIR 6//y-ašis žingsninis variklis krypties valdymo
#define Z_ DIR 7//z-ašis žingsninis variklis krypties valdymo
#define X_ STP 2//x-ašies žingsnis kontrolės
#define Y_ STP 3//y-ašis žingsnis kontrolės
#define Z_ STP 4//z-ašis žingsnis kontrolės
/*
//Funkcija: žingsnis Funkcijos: kontroliuoti kryptį ir etapai žingsninis variklis.
//Parametrai: dir krypties valdymo, dirPin atitinka DIR pin žingsninis variklis, stepperPin atitinka žingsnis pin žingsninis variklis, ir veiksmus,
//No return vertė
*/
tuščia veiksmą(boolean dir baitų dirPin, baitas stepperPin, int žingsniai)
{
digitalWrite(dirPin, dir);
vėlavimas(50);
for (int i = 0; i
digitalWrite(stepperPin, DIDELIS);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
Void setup() {//Nustatyti IO pin kodą naudoja stepper motor produkcija
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(LT, OUTPUT);
digitalWrite(LT, LOW);
}
void loop(){
žingsnis(klaidinga, X_DIR, X_STP, 200); // X-axis motor apsisuks 1 ruožtu, 200 veiksmus, kreiptis
žingsnis(klaidinga, Y_DIR, Y_STP, 200); // Y-axis motor apsisuks 1 ruožtu, 200 žingsnių 1 eilė
žingsnis(klaidinga, Z_DIR, Z_STP, 200); // Z-axis motor apsisuks 1 ruožtu, 200 žingsnių 1 eilė
delay(1000);
žingsnis(tiesa, X_DIR, X_STP, 200); // X-ašies variklis sukasi į priekį už 1 ratą, ir 200 žingsnių ratu
žingsnis(tiesa, Y_DIR, Y_STP, 200); // Y-ašies variklis sukasi į priekį už 1 ratą, ir 200 žingsnių yra vienas ratas
žingsnis(tiesa, Z_DIR, Z_STP, 200); // Z-ašies variklis sukasi į priekį 1 ratas, 200 žingsnių yra vienas ratas
delay(1000);
}
Eksperimentinis reiškinys: stepper motorinių apsuka vieną ratą, trumpam vieną sekundę, ir tada juda į priekį už vieną ratą.
Verta paminėti, kad A4988 modulis neturėtų būti įdėta reversely.Elektros instaliacijos režimą žingsninis variklis yra:
2A, 2B grupė (raudona, žalia), 1A, 1B grupės (mėlyna, geltona).Jei norite pakeisti kryptį, galite pakeisti padėtį, vieną grupę, pvz., 2A ir keistis su 2B.
jei nerandate savo gaminio modelio, prašome susisiekti su klientų gauti naujausias kainas ir informaciją. gamintojas:hanschip puslaidininkinių gamintojo produkcijos numeris:tl494idrg paketas/dokumentas:juosta & ritės (tr)/2500 aprašymas:sop-16 ac-dc valdytojai & rohs reguliatoriai naudojimas:ac-dc valdytojai & reguliatoriai profesionalių elektroninių komponentų tiekėjas. mes
palce20v8q-15pc pdip24 palce20v8q-15pc/4 elektroniniams komponentams pcm53kp-v spt1018bin tb62709n tmm2016 naujas originalus tmm2016bp
sveiki naujų ir senų klientų shenzhen jiexincheng mikroelektronikos co., ltd 1. sveiki siųsti mums savo rfq arba bom sąrašą, mes suteikiame jums mūsų geriausias kainos! jūs galite palikti mums pranešimą arba atsiųsti el. paštu, mes pasistengsime atsakyti jums artimiausiu metu! 2.jei negalite rasti chip jums reikia mūsų parduotuvėje, prašome susisiekti su mumis tiesiogiai ir mes jums priimtiną kainą! laivybos
mieli draugai, ką elektroninių komponentų, jums reikia susisiekite su mumis?daugelis iš mūsų išteklius yra ne ant lentynos.mes galime susisiekti su mumis nuolat atnaujinimo procesą.mes galime jums padėti bendradarbiauti su visais, elektroniniai komponentai ir integriniai grandynai.
zhuo core hui electronics buvo įkurta 2002 m., yra integruotos grandinės ir kitų elektroninių komponentų profesinių tarptautinių platintojų, po metų stabilaus vystymosi, sukurti geros tarptautinio verslo reputaciją ir gerą vardą.įsiliejimo į puikią įmonės reputaciją, laikytis sąžiningumo pagrįstas verslo filosofija, dauguma klientų pagyrimų ir palaikymo.toliau pateikti klientams kokybiškus produktus ir kokybiškas
vieno langelio rungtynės privalumai elektroninės dalys greitai ir greitai citata jums reikia tik jūsų bom atsiųsti mums laišką iš stotis mes citata jums kuo greičiau mes gauti bom nerimauja, produktų kiekį reikia?
paketas apima: 0.25 0,5 a 1a 2a 3a, 5a, 8a, 10a 15a 20a 5vnt kiekviena
prašome susisiekti su mumis dėl daugiau kiekiai prekių kaina yra mažiausia paketo kaina. jei jums reikia daugiau kiekį, galite atsiųsti mums užklausą ir mes pasiūlysime jums geriausią kainą pagal kiekį jums reikia. q1: ką s jūsų įmonė gamta? a: mes derinys gamintojai ir atstovai, su aukščiausio lygio profesionalų komanda, tarnauja integriniai grandynai, diodai, tranzistoriai, davikliai,
mažą pelną, bet greita apyvarta, garantuotą kokybę, jei jums reikia daugiau, prašome susisiekti su mumis, mes pakoreguos kaina tarnauti jums geriau patarimai pirkėjams 1: pirmiausia įsitikinkite, kad tha t jūsų adresas yra teisingas 2: prieš ženklas, siuntinių, prašome patikrinti sklypas yra pripildyta produktų apie mus pažadame, kad: * gamyba tik geriausi vartojimo prekių ir
produkto pardavimo taškų: 1. kelių valdymo režimais, lygiagrečiai uosto kontrolės režimas, nuosekliojo prievado režimas, skelbimų mygtuką valdymo režimas. 2. transliacijos kalbą sustabdymo funkcija, galite pristabdyti foninės muzikos, kuri yra žaisti. 3. nurodytos muzikos gali būti žaidžiamas naudojant nuoseklųjį prievadą mikrovaldiklis. 4. mygtuką mode, galite pasirinkti peržiūros režimas:
ina826aidgkr ina826aidgkt ina826aidgk ina826 ipdi vssop8
lkxy parduotuvėje daugiausia užsiima mažmeninės ir didmeninės prekybos elektronikos komponentų, su daug tiekimo ir konkurencingas kainas.
 lt
lt Ispanija
Ispanija 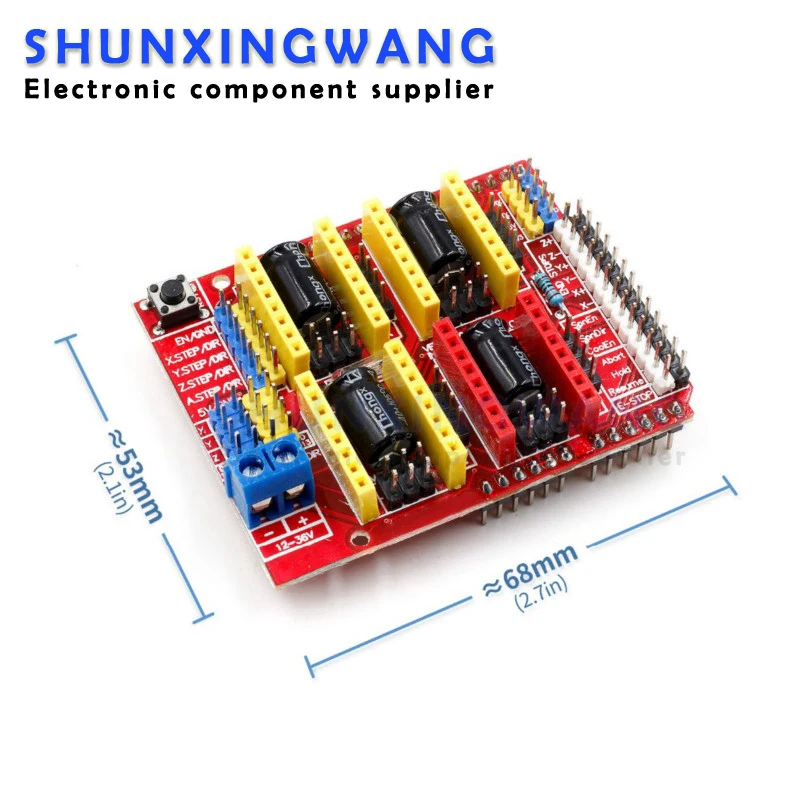


















Palikite peržiūros